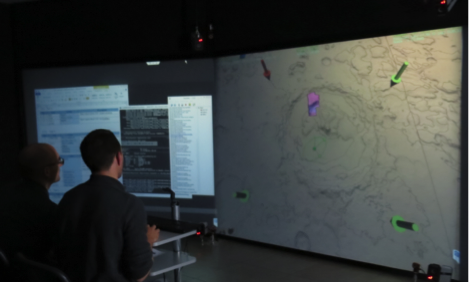
Use case 1: Landing site selection
This use case focused on visualizing, analyzing and presenting relevant aspects of research in the landing site selection for past (i.e. Spirit), current (MSL – Mars Science Laboratory) and future (Insight, ExoMars) Mars robotic missions. There is very good coverage by orbital datasets for these sites and it is currently being enhanced by Mars Express and MRO (Mars Reconnaissance Orbiter) instruments.
In this use case, the science users were able to:
- Analyze the geological features of selected areas on Mars;
- Apply basic GIS (Geographic Information System) functionality and a selection of real-time analysis tools;
- Analyze the surface and subsurface structure of the terrain.
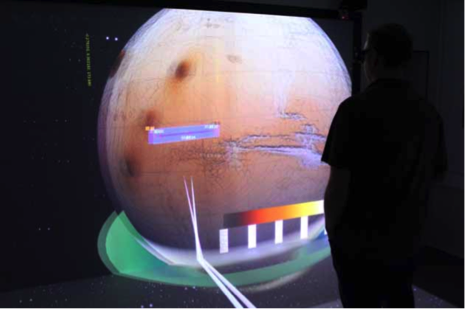
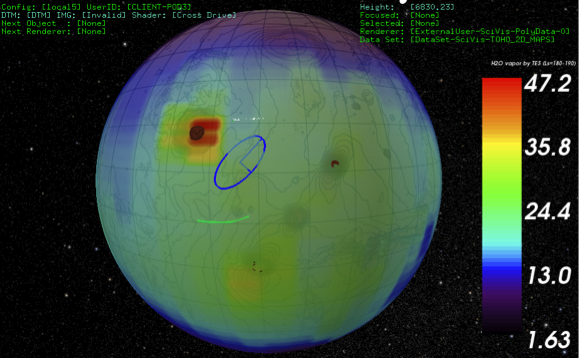
Use case 2: Mars atmospheric data analysis and benchmarking
This use case had the scope to visualize, analyze and discuss state of the art research on Mars atmosphere. Global views of Mars were exploited in order to analyze concepts relating to the global circulation like geo-potential maps, time/spatial variations of selected variables and to compare datasets.
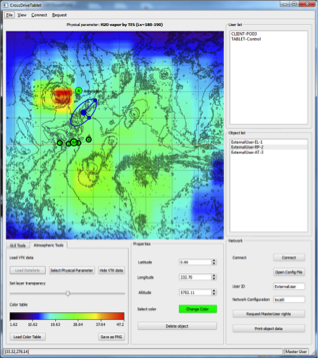
In particular, in addition to the already available functions, the users were offered the possibility to perform:
- Comparison and benchmarking among data from different payloads;
- Comparison among data collected from different locations or time;
- Correlation and benchmarking between satellite and ground based measurements;
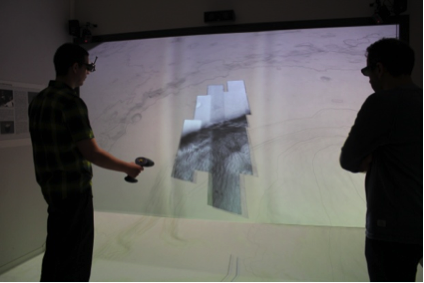
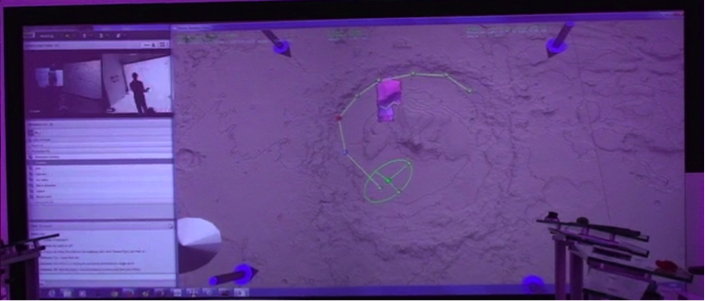
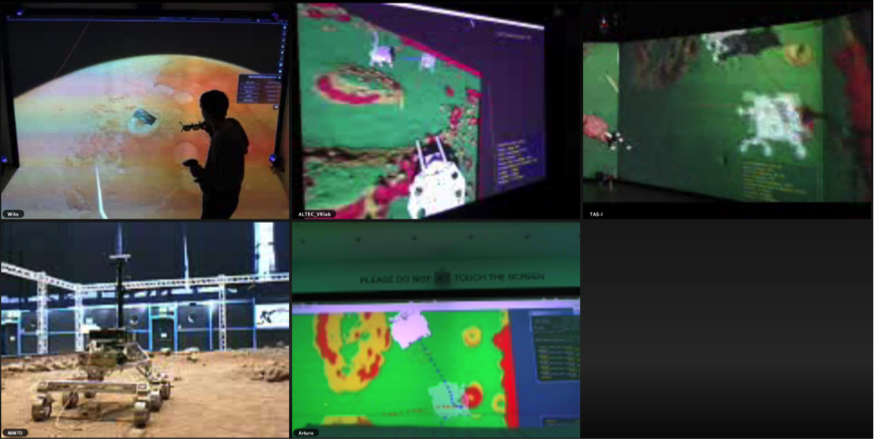
Use case 3: Rover target selection
This use case had the scope to visualize, analyze, prepare, execute and discuss the operations of planetary rovers and satellites. The process of collection and visualization of real-time data from the Mars rover was added to this third use case. The rover in Mars is emulated by breadboard into ALTEC Terrain Demonstrator.
In particular, the system allowed:
- Analysis of the geological features of the terrain as viewed by the on-board cameras of the rover;
- Analysis of the morphology of the terrain in correlation with the expected landing trajectories;
- Provision of commands to the rover;
- Review of the data coming from the rover after commands execution.
The three use cases above are only a subset of all possible scenarios in space exploration missions. They were chosen as they represent a good mix of data analysis, probe operation and close collaboration between scientists and engineers. The CROSS DRIVE project uses these scenarios as a base to derive the requirements of users on data, tools and infrastructure to develop a prototype collaborative workspace as well as a benchmark for evaluating the system.